Back to School: Inertial Sense Support for Academic Research Projects
Inertial Sense has deep roots in its university relationships. Our founder cut his teeth building a drone autopilot based on a research project at Brigham Young University’s MAGICC lab.Knowing what it takes, we’ve always had an affinity for the support of students and their research. Check out some of the University Researchers we have been able to support with their autonomous robotic applications.
Check out these three University Projects!
Brigham Young University
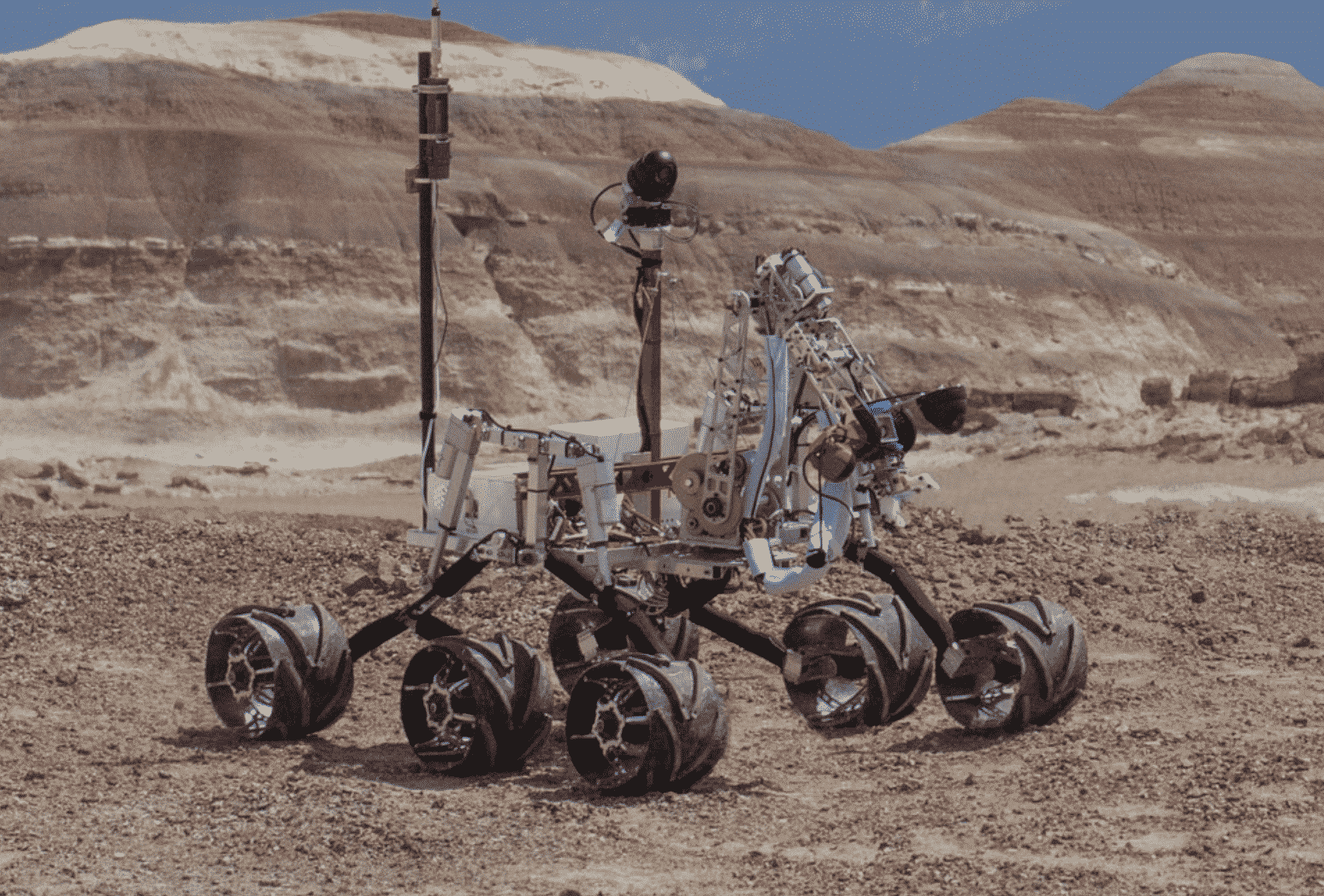
Mars Rover
Brigham Young University’s Mars Rover Team used the Inertial Sense µINS in 2017 and 2018 URC competitions (University Rover Challenge). This exceptionally competitive international robotics competition admits 36 teams out of over 90 applicants each year. Traversing rocky terrain, the BYU rover autonomously navigated to and from GPS waypoints in the field. In 2018, the team took 1st place in the autonomous terrain traversal task.
Inertial Sense was an integral part of our approach
– BYU MARS Rover Team Engineer

University of California, Berkley
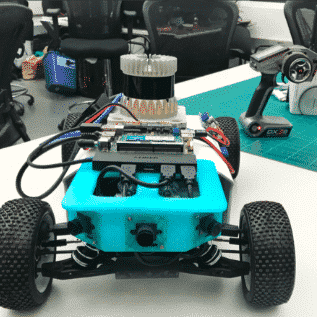
Autonomous Motion at Cal (AMAC)
The UC Berkley team built a 1/8th scale Autonomous RC car from the ground up as an initial project. Their goal was for the vehicles to navigate through multiple distinct routes on various terrains around campus. These cars would be durable, adaptable, and agile. The end goal is multi-agent cooperation through a fleet of mobile robots.
The Inertial Navigation System (INS) publishes a unique message type “INS” which is converted to an odometry message “odom”. The ROS package, gmapping, uses 5DOF SLAM with the 2D LaserScan and the odometry message to publish data in an occupancy grid and to determine relative position within our environment. The INS is also used in conjunction with the Ackermann steering model to determine the car’s position as it moves.
University of Wisconsin
Mars Rover
The Wisconsin Robotics team has many years of experience in robotic applications. They recently participated in the University Rover Challenge where they were tasked to navigate to specific GPS locations and retrieve tennis balls. The uINS sensor is a core navigation component for the team.