Video
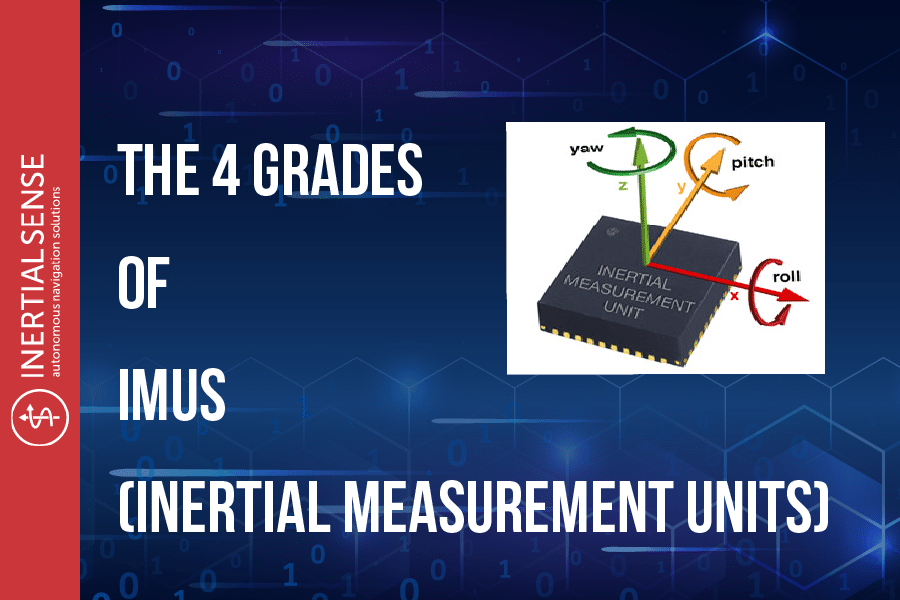
The 4 Grades Of IMUs (Inertial Measurement Units)
There are 4 grades of IMUs. Each of these grades serves a different purpose for customers with different needs. Watch the video below as Carson goes through the 4 grades of IMUs. Consumer Grade IMUs Consumer-grade IMUs are made for automotive and commercial use. These inertial measurement units have the lowest cost of each […]
Video
IMX-5 Tactical Grade IMU Applications & Use Cases
The IMX-5 is a low-cost, tactical grade IMU. Numerous companies have already shown interest in this revolutionary product. Watch the video below as Carson discusses the details of some of the use cases that have already implemented IMX-5. Case Study: Defense and Aerospace In the first case study, a multi-billion dollar aerospace […]
Video
Introducing The IMX-5, A Low-Cost, Tactical Grade IMU
Despite the financial market and supply chain disruptions, the need for Tactical Grade IMU’s and Inertial Sensors has never been higher. Almost everything being manufactured today has a motion component and needs to be tracked, driven, or analyzed. So the question is, who can deliver the highest performance at the lowest cost? Watch the video […]
Video
Who Should Be Interested In Inertial Sense’s Technology?
Technology has come a long way, but still has such a long way to go. There are many clients that come to Inertial Sense. Watch this video below as Carson and Brett discuss what kind of clients come to Inertial Sense and why. Inertial Sense not only serves small startup companies, but we offer […]

Video
Our New Products & Current Technology
Technology is a growing industry and shows no signs of slowing down. Watch the video below as Brett and Carson discuss what new technology Inertial Sense has to offer in terms of our new products and current technology (like our IMU sensors). Inertial Sense not only offers autonomous software, but we offer RTK and are […]

Video
Why Do Partners Work With Us? – We Partner With Legacy Robotics Manufacturers
You could go to any company in the world for your autonomous robotic software and firmware. Why do our partners work with us? Watch the video below as Tom and Brett explain what makes our autonomy solutions unique in our partnership with legacy robotics manufacturers. What makes us unique is we are customer-driven. Without […]

Video
The Path To Revenue For Autonomous Mobile Robotic Manufacturers
Autonomy is a robust industry (no pun intended). So how do we make money? Take a look at the video below as Brett asks Tom to explain the ins and outs of the path to revenue for autonomous mobile robotic manufacturers. As autonomy continues to grow, so must the revenue. How this is accomplished […]
Video
What Does Inertial Sense Have To Offer To Investors? (Part 2)
In part one, we discussed what we have to offer our investors. Watch this video as Brett and Tom dive a little deeper into what Inertial Sense has to offer investors in terms of viable autonomous robotics solutions. One thing that is a leading topic when talking with our investors is being a brain […]

Video
What Does Inertial Sense Have To Offer To Investors? (Part 1)
You might be wondering, “what does Inertial Sense have to offer to investors?” Like with anything you invest your time and money in, we want to make sure you invest wisely. Watch this video as Tom and Brett discuss why investing in Inertial Sense makes dollars and sense. There are usually three reasons investors […]
Video
Why Don’t Legacy Robotics Manufacturers Go To Tesla For Autonomous Solutions?
Tesla is a great company for creating autonomous vehicles. But will it work for your autonomous fleet? Watch this video to learn more about what resources legacy robotics manufacturers’ autonomous solutions you may require. Tesla is a worldwide leader in the automotive industry when it comes to autonomous vehicles. But it may not be […]