Blog
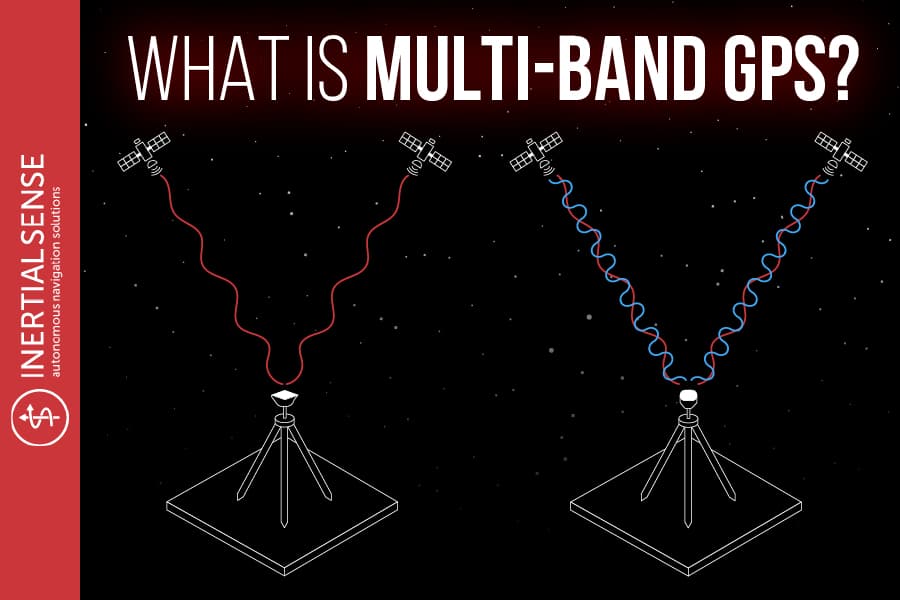
What is Multi-Band GPS?
Multi-band GPS systems offer much more reliable and consistent locating and positioning for autonomous systems and multi-frequency devices. These new technologies are designed to reduce location errors and to provide outstanding accuracy for even the smallest devices. Additionally, they enable devices to get up and going significantly quicker due to the faster “fix” times a […]
Video
How Is The Field Surrounding Autonomous Robotics Advancing?
In the robotic field, we are excited about its advancement. Technology is driving us into the future in ways we could have never imagined. Watch the video below as Tom breaks down how the field surrounding autonomous robotics is advancing. Also, he shares thoughts about data as a service, autonomy as a service, environment as […]
Video
IMU Sensors 101 – Pros & Cons of Sensor Types
One of the most common questions we get at Inertial Sense throughout the industry is what am I looking for and what’s the difference between IMU sensors and their options, including AHRS, Kalman filters, and so on. Watch this video below as Carson talks you through each individual module and the difference between them and […]
Video
What Are Autonomous Robots Used For?
Many wonder, what are autonomous robots used for? Watch the video below as Tom explains what uses we have for autonomous robots. There are a host of uses, but the three main categories where the markets are looking for autonomy to solve the problem are: Economics Safety Physical Access In many cases, the decision […]
Video
What Is a Calibrated IMU and Who Should Get One?
Having a calibrated IMU is critical to your robotic device receiving accurate information and better accuracy. Watch the video below as Walt explains the importance of a calibrated IMU and how it applies to you. What Is a Calibrated IMU? A calibrated IMU is where a factory sensor that’s manufactured by another company, is […]
Video
What Is The Difference Between Automated and Autonomous?
Knowing the key differences between an automated and an autonomous robot is a critical factor within the robotics industry. Curious what the main differences are? Watch the video below as Tom explains the difference between automated and autonomous. What Are Automated Robots? Automated robots are robotic vehicles using some sort of physical infrastructure for […]

Video
Our Technology Overview and Applications
The core of our technology is an inertial measurement unit, or an IMU, which consists of three access gyros and accelerometers. IMU is used in an AHRS, or an attitude heading reference system. Our software integrates or fuses the gyro and accelerometer data from the IMU to estimate roll, pitch, and heading, helpful for GPS. […]
Video
What We Do, What We Don’t Do
Our specialty is building the brain that does autonomous navigation. At some point, we may build a robot in the future, but right now, our business is delivering this value to OEM manufacturers who make these robotic devices that want them to be autonomous. Watch the video below as Tom explains what we do and […]

Video
The Difference Between IMU, AHRS, and INS
Shopping around for an inertial sensor, people think of INS, aka inertial navigation system. Maybe you need an IMU, which is super simple. Understanding the difference between IMU, AHRS, and INS is going to help pick the right product for your specific application. Be sure to watch the video below as Morgan explains the difference […]
Video
How Do Autonomous Robots Navigate?
Programming robots is not a new science. But having the right programming criteria can make a difference in your autonomous mobile robotics’ performance. There are three major components you should be familiar with for autonomous robot navigation. Watch the video below as Tom unpacks the three general rules for how autonomous robots navigate. 3 […]