
Everything You Need to Know About INS
Understanding the components and processes that make up an inertial navigation system (INS) is essential for modern companies that plan to implement these systems as part of their overall business operations. Hardware, firmware and implementation of inertial systems are the three components that matter most in the inertial navigation field and inertial measurement units. Here are the basics of inertial systems for modern businesses:
Hardware: The right blend of quality, quantity, and cost of sensors you need to consider.
Firmware: The filtering and data blending/processing that is essential to accurate and high performing systems (these are not standard between companies).
Implementation: Usually the least considered, yet arguably most important part of choosing an INS. Documentation, quality and competence of your support could be the difference between an on-time, on-budget product launch.
Everything You Need to Know About INS
Inertial navigation systems calculate the position of devices in relation to specific reference points or to fixed coordinates. In the robotics and automation fields, INS system implementations manage roll and pitch and monitor and maintain headings, positions and speed. This requires a variety of component parts that must all work together to create autonomous robotics and navigation systems.
In order for a robotic system to move about autonomously it needs to have a good idea of where it’s at, which way it’s pointing, where to go, and finally know how to get there. It all starts with the hardware components.
The Components of Inertial Navigation Systems
INS systems consist of three basic components:
- Hardware
- Firmware or software
- Implementation
One should consider each of these as they prepare to make a decision on which INS would fit their product best.
Inertial Navigation Hardware In Autonomous Systems
The hardware components used to create autonomous navigation through INS systems include some or all of the following elements:
INS Sensors
- Accelerometers are used to measure the acceleration and the relative speed of the device in which they are installed. By measuring the changes in the velocity of the device and its acceleration, accelerometers are vital to determining the position of the device at various points.
- Gyroscopes are physical sensors that determine the angular position and motion of a specific object or device in relation to a specific inertial reference frame. These devices are needed to determine the exact attitude of devices in relation to other reference points and inertial frames.
- Magnetometers are sensors that detect magnetic fields. They are used to provide navigational points of reference for devices, robots and systems.
- GPS receivers that connect to the Global Navigation Satellite System, more commonly referred to as GNSS, provide added information to the inertial system regarding its position and location. Antennas may be added to allow the autonomous system to access the GNSS network more easily.
- A microprocessor runs the necessary firmware for the system to operate. If desired, internal storage devices log the movements, locations and activities of the system during operation.
Form Factor
Devices are typically produced for either a protected or rugged environment. Where the sensor can be protected from the environment, it can be caseless providing the smallest footprint available. When put on something like a drone, it will need to be a “ruggedized” case, which will typically be an aluminum enclosure.
Inertial measurement units (IMUs) integrate the micro-electromechanical systems, gyroscopes, magnetometers and accelerometers into one convenient device that can be used to manage robotic navigation. An attitude and heading reference system (AHRS) combines the functionality of an IMU with the ability to detect and act on the attitude of the robotic system in relation to other fixed points of reference. And finally, the GPS antenna provides satellite data to give navigation capabilities to the device. Additionally, one might opt for a “dual-compassing” unit to provide protection against magnetic interference when gaining heading. This provides for a faster “fix” making your device able to get up and running much quicker. All these together (IMU, AHRS, GNSS) make up an inertial navigation system (INS)
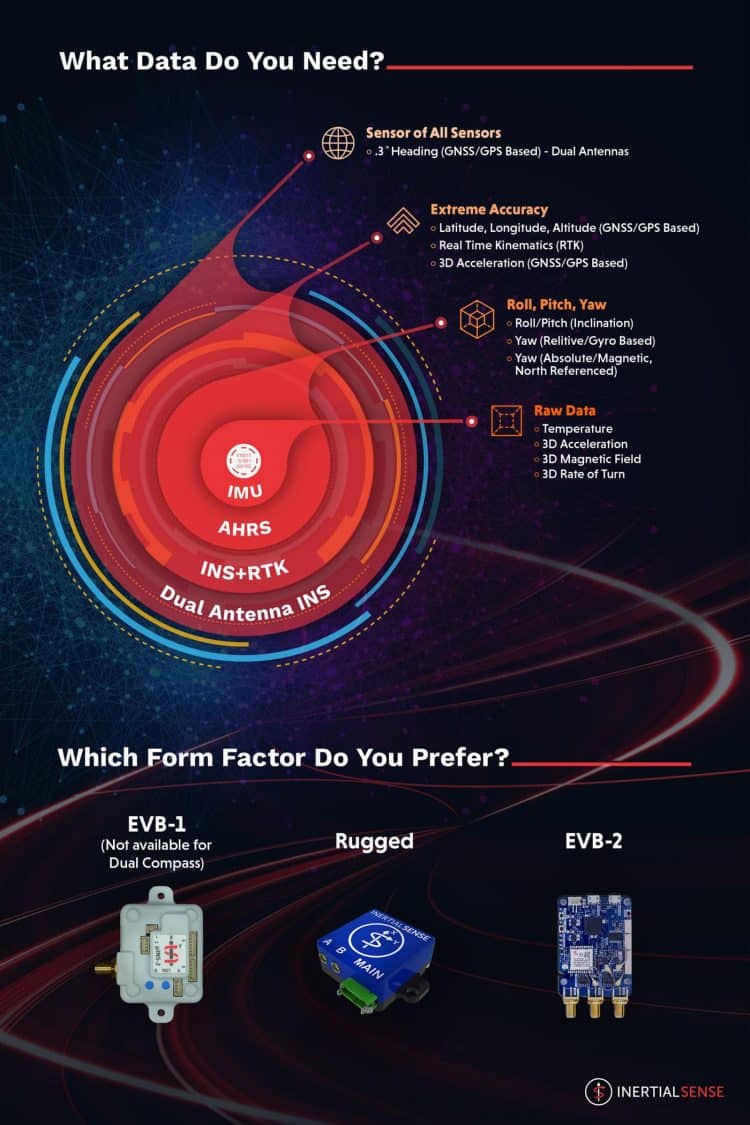
Which INS Form Factor Do You Prefer? Everything You Need to Know About INS
Choosing The Most Cost-Efficient Inertial Measurement Units
When considering hardware acquisitions for inertial navigating systems, a few factors will make a significant impact on the cost and the effectiveness of these navigation tools that are inertial measurement units:
- Fiber-optic gyroscopes reduce the number of sensors required for accurate readings. However, these devices cost significantly more (sometimes as much as 100X) on an individual basis. Higher-quality gyroscopes and other hardware components increase the accuracy and reduce drift.
- Lower-cost combinations of accelerometers, gyroscopes, GPS systems and magnetometers often provide adequate navigational cues for systems that operate in closed environments or that do not require precision in managing location and navigation tasks. Each of these sensors’ data combines to help correct and offset the errors of just one sensor alone. The whole is greater than the sum of the parts in this case–all thanks to sensor fusion (talked about next).
For most companies, this blend of low cost sensors meets the performance and cost needs for their projects. Finding the sweet spot when balancing cost and performance will ensure that you deploy the most cost-efficient inertial measurement units and the best solutions for your company’s specific set of needs.
Inertial Navigation Firmware
The firmware used in inertial navigating systems consists of two basic elements:
- Sensor fusion firmware allows the data from all the hardware sensors to be delivered to the processing unit. This puts the data into a form that can be read and understood by the microprocessor inside the device.
- The Kalman filter is necessary to the sensors’ data processing accuracy but is not always included when purchasing a sensor. When it is provided, it comes as a proprietary program and generally is unique to the hardware setup and the company that designed it. Kalman filters are used to eliminate irrelevant information, which is also referred to as noise. By reducing noise and delivering relevant data, Kalman filtering can allow more efficient use of computing resources in managing the navigational activities of autonomous systems.
Some of the most important factors in successful filtering of data include the way in which the data is collected and delivered and the documentation and recording of information, especially during the initial implementation, to provide added help in determining the areas in which improvements can be made. User-friendly interfaces and the speed of visualization for the system are also key factors in determining the overall success of the project.
INS Implementation
The implementation process for inertial navigation programs usually requires the greatest investment in resources used and the time needed for success. Some of the key components of this process include the following steps:
INS Scoping Phase:
- Evaluating available options in the INS marketplace
- Determining the types of sensors needed for your autonomous navigation project
- Assessing the ability of the inertial navigation company to deliver the results you need
INS Implementation Process:
- The quality and completeness of the sensor and firmware documentation
- The knowledge, expertise, and availability of your sensor support staff
- The compatibility of your desired system with what the sensor offers
- The integration of your control system to the sensor data
Each of the items above should be reasonably researched and scoped out when deciding which INS manufacturer to contract with. Ideally, you will find a sensor with the right hardware, firmware, and implementation process for your company’s needs all within a cost structure that makes your autonomous robotic system profitable and high performing. All of this is a great segway into our own shameless plug.
At Inertial Sense, we specialize in providing the best and most practical solutions for your autonomous navigation needs. We offer some essential features that can streamline your implementation and can allow you to achieve the best possible results:
INS Hardware
- In terms of physical footprint/performance ratio, our INS sensors are second to none. They are reliable, precise, and literally the size of a dime.
INS Firmware
- Our Kalman filter has been refined for about a decade and provides data virtually free from errors, keeping your device on track and drift-free.
- Our unique solution to sensor fusion allows us to integrate with a wide selection of sensors, even ones we don’t make ourselves.
INS Implementation
- We offer an integrated evaluation tool to allow you to troubleshoot and correct errors in your data on-the-fly and to assess the performance of each of your sensors. This can save you time and effort in determining the accuracy of your system in operation.
- Our dedicated software development kit is regularly updated and offers an easy-to-use interface and plenty of documentation. This ensures that you receive the latest updates and upgrades free of charge and that you are kept in the loop regarding the changes we are making on your behalf.
- Inertial Sense takes pride in providing the easiest and most convenient implementation processes in the industry. We work with you to ensure that you receive the training and the support that you need to make this process go as smoothly as possible.
- We write documentation without all the jargon. This eliminates barriers to quick adoption of our autonomous navigation systems. Along the same lines, we offer live human support for your implementation with screen sharing and fast turnaround times, which allows you to reach a real human being when you need help from us.
Inertial Sense delivers the right solutions for hardware, firmware and implementation for your company’s current and future needs. To learn more about our autonomous navigation systems or to request a demo, call us today at 1-801-609-3697. We look forward to the opportunity to touch base with you.