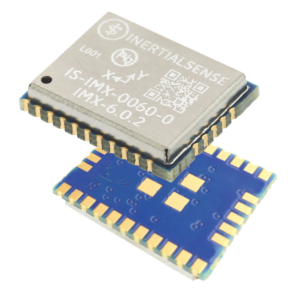
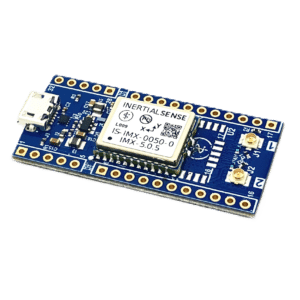
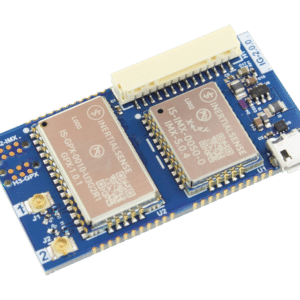
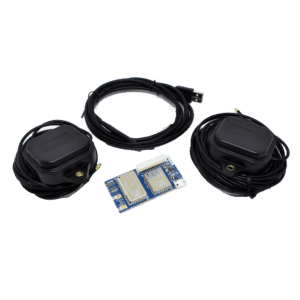
Small, Cost Effective & Accurate
Volume pricing is available. For details, select a product below or Contact Us.







✕
Stay Connected
Receive periodic emails from us for new product announcements, firmware updates, and more.
Founded in 2013, Inertial Sense is making precision and autonomous movement so easy it can be included in nearly any type of device. With an initial focus on small workhorse devices such as robotic mowers, last-mile delivery vehicles, precision agriculture, and consumer equipment, Inertial Sense is transforming how the world moves.